Overview
Architecture students are often constrained by their inability to visit worksites when needed. For my HCI class, our team of two worked with architecture students at Virginia Tech to see if we could integrate immersive technology into their workflow. We created a VR application system that pairs with a robot allowing users to visit worksites remotely, saving them time and money and giving them the flexibility to explore their worksites in a 3D environment.
I was responsible for user research, the digital wireframes and prototypes, and helping with user testing.
Role
User Experience Design and Research
Timeframe
Aug - Nov 2022
Team
Grace Reback and Jasmine Ly
Design Process
1. Analyze
In order to gain a better understanding of how VR is used in architecture education and the Virginia Tech architecture studio space in Cowgill hall, the team conducted background research, ethnographic research, and user interviews. I collected data through user interviews and background research and then created Work Affinity Notes (WANs) and consolidated them into a larger Work Activity Affinity Diagram (WAAD).
Research
- User interviews with 2 current Virginia Tech architecture students
- Ethnographic research of architecture studio in Cowgill hall
- Background research on architecture education and the use of immersive technology such as VR in architecture
- Ethnographic research of architecture studio in Cowgill hall
- Background research on architecture education and the use of immersive technology such as VR in architecture

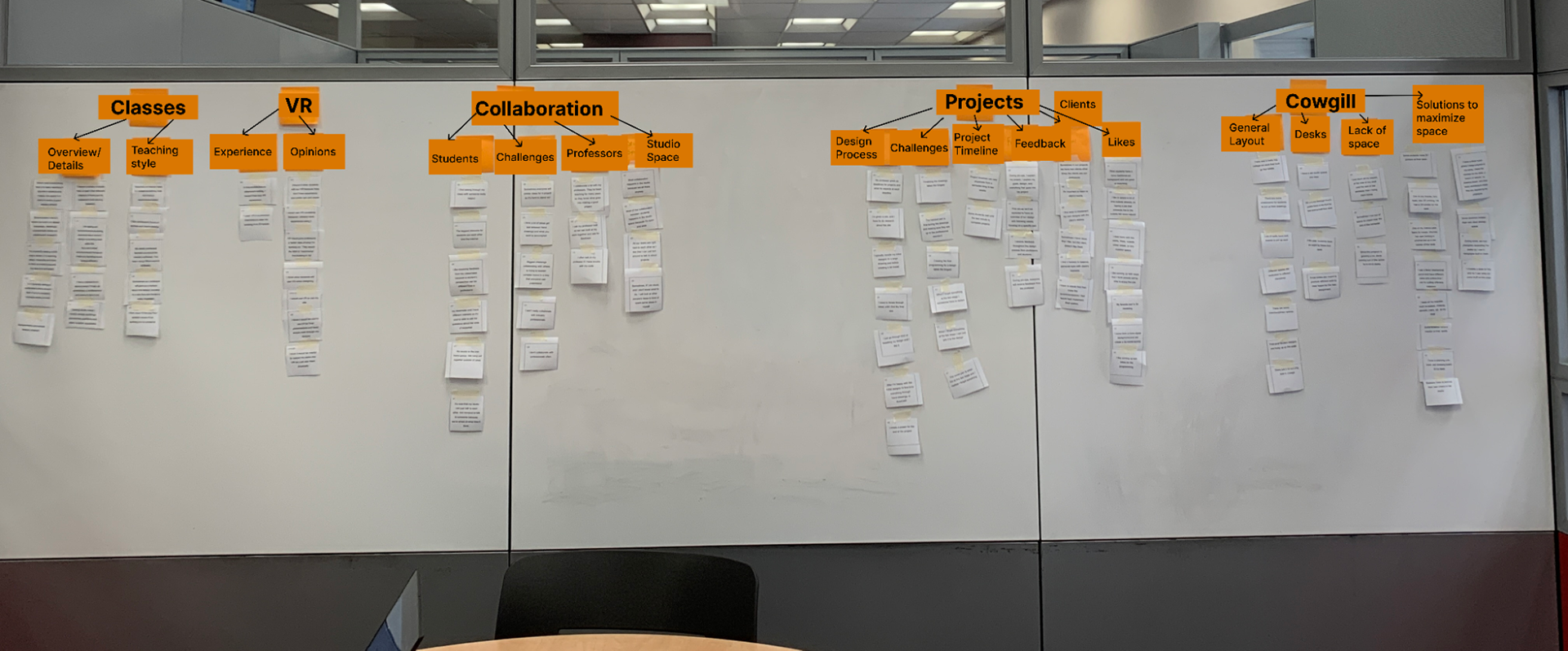
Work Activity Affinity Diagram (WAAD)
The team conducted a WAAD from the WANs created during research. The WAAD allowed us to organize the notes collected and gave us a better understanding of how the architecture students at Virginia Tech work and learn.
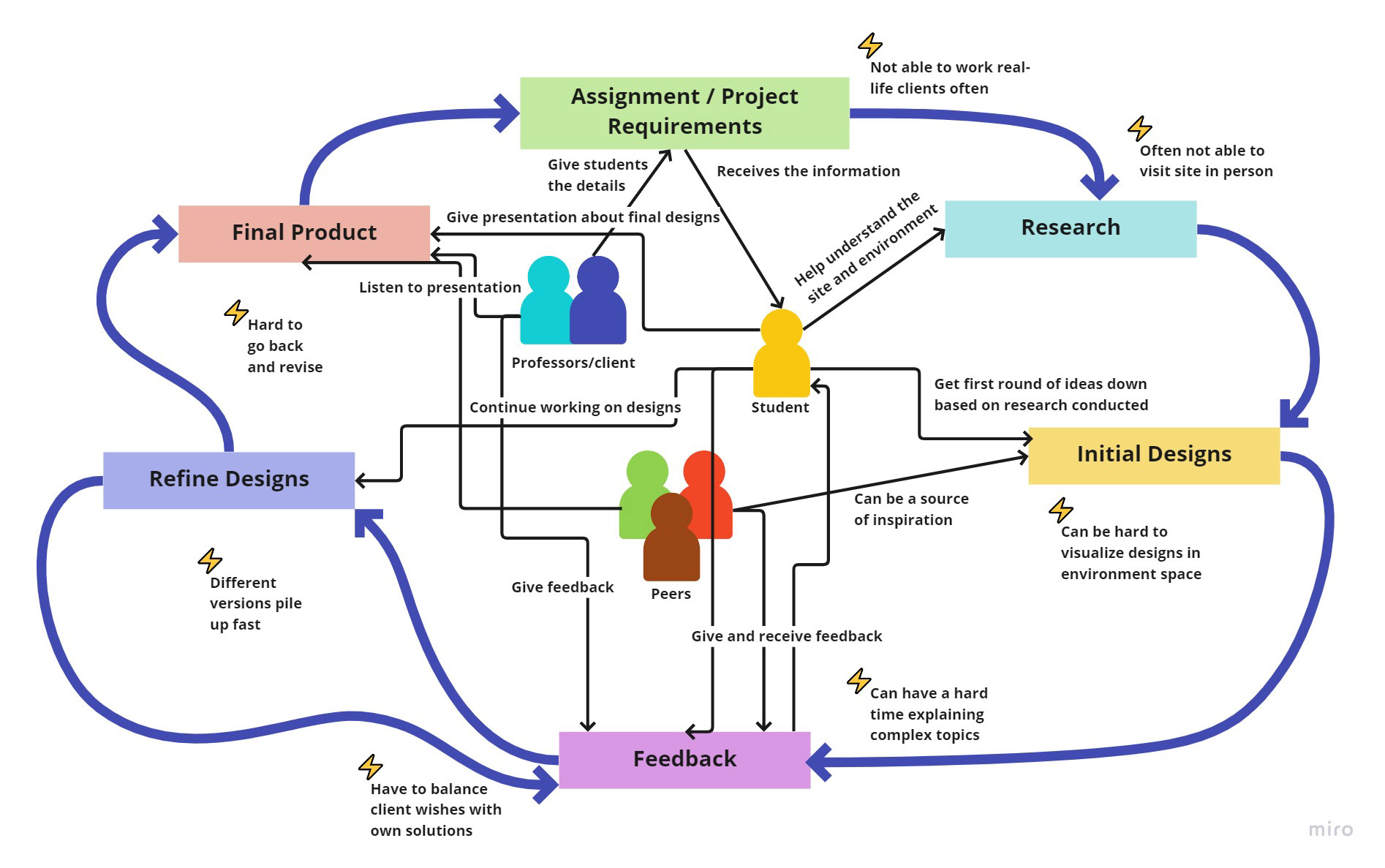
Flow model detailing the design process of architecture students
Flow Model of Typical Architecture Student's Workflow
I created a flow model of a Virginia Tech architecture student’s workflow to better visualize the scope of their entire work practice. The flow model provides an overview of the workflow and design process that the students go through.
Based on the model we were able to see the iterative nature of the student's work. They will often repeat many rounds of sketches and feedback before finalizing designs. The flow model also illustrated the other active entities such as professors and peers.
Based on the model we were able to see the iterative nature of the student's work. They will often repeat many rounds of sketches and feedback before finalizing designs. The flow model also illustrated the other active entities such as professors and peers.
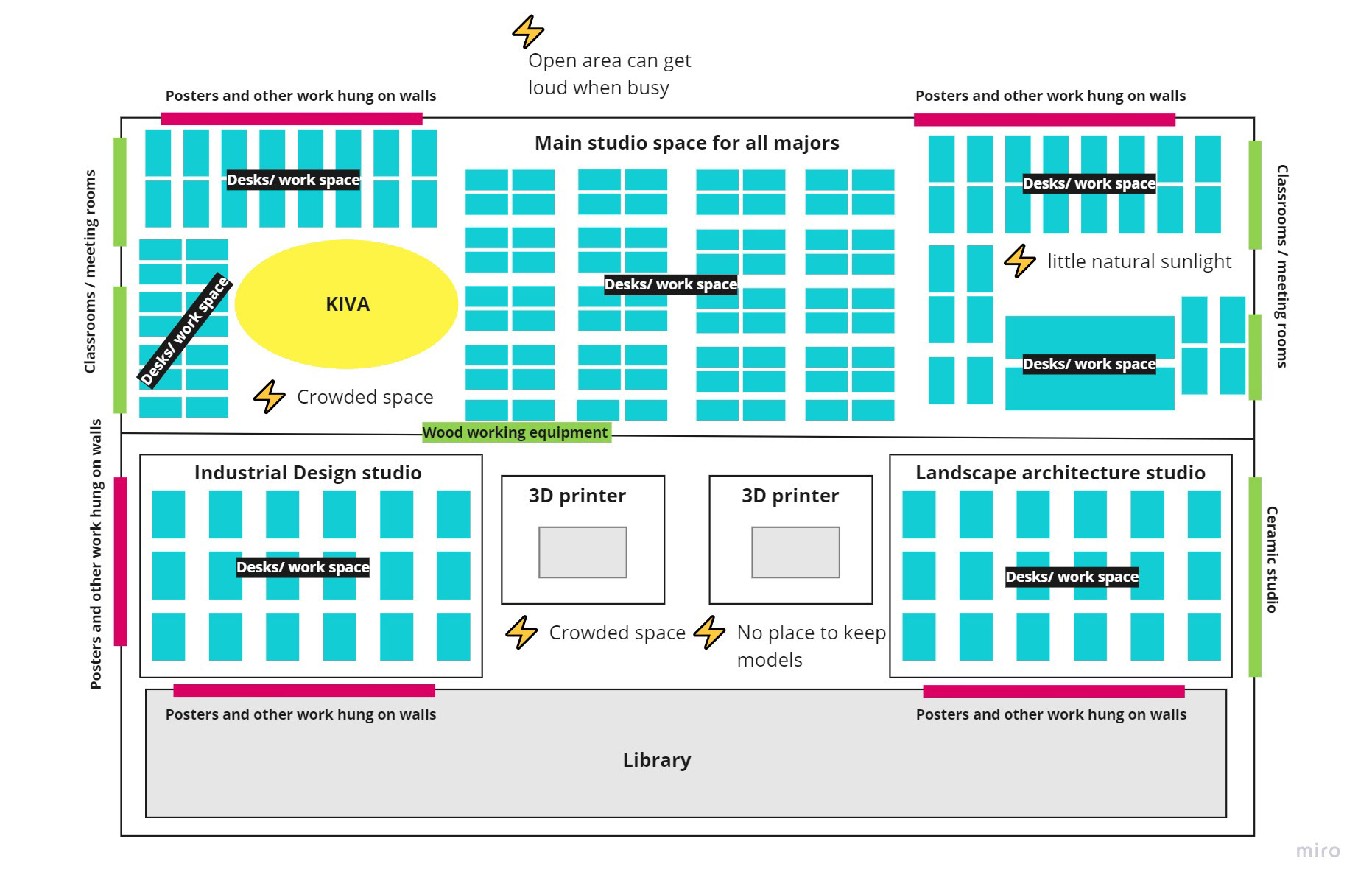
Physical Model of Cowgill Hall
I created a physical model of the basement of Cowgill Hall to visualize the space student work in to gain a better understanding of how the work-related environment factors affect tasks in real usage.
The physical model of Cowgill Hall illustrates the main studio space for architecture students at Virginia Tech. It was important for us to understand the physical space where students work and everything in the space affects each other.
The physical model of Cowgill Hall illustrates the main studio space for architecture students at Virginia Tech. It was important for us to understand the physical space where students work and everything in the space affects each other.
2. Design
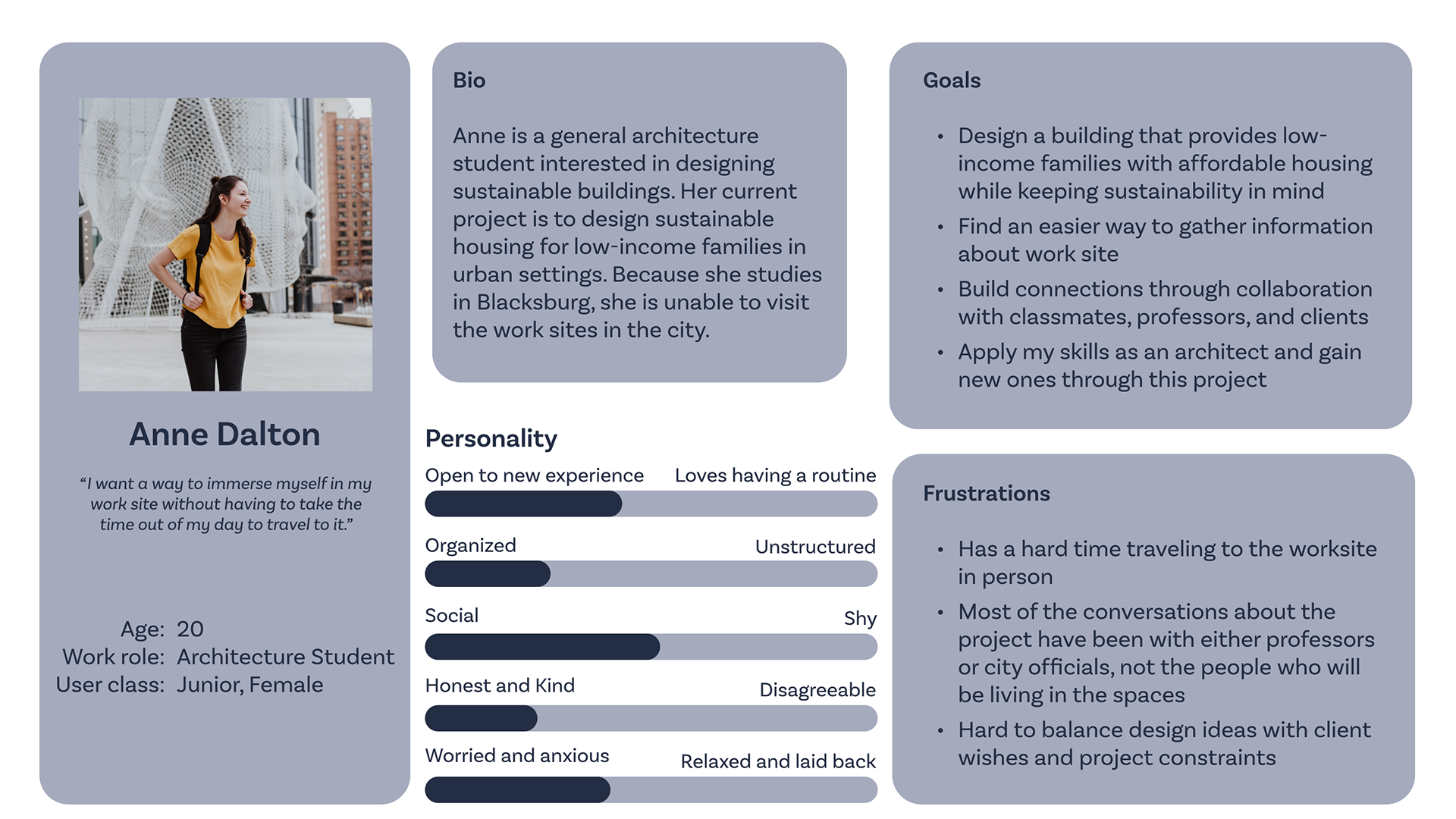
I created personas based on the research conducted in Phase 1 to use as a starting point for our ideation sessions. The team then conducted several ideation and critique sessions to brainstorm ideas. Afterward, we voted on ideas to narrow down solutions. I then moved on to creating a storyboard and an application outline based on the goals and requirements.
Personas
Five personas were created and were used their descriptions and frustrations as a starting point for many brainstorming sessions. Our target persona is Anne, a third-year architecture student whose main goal is to figure out a way to gather information about her worksite despite not being able to visit it in person. Other personas include architecture professors and potential clients.
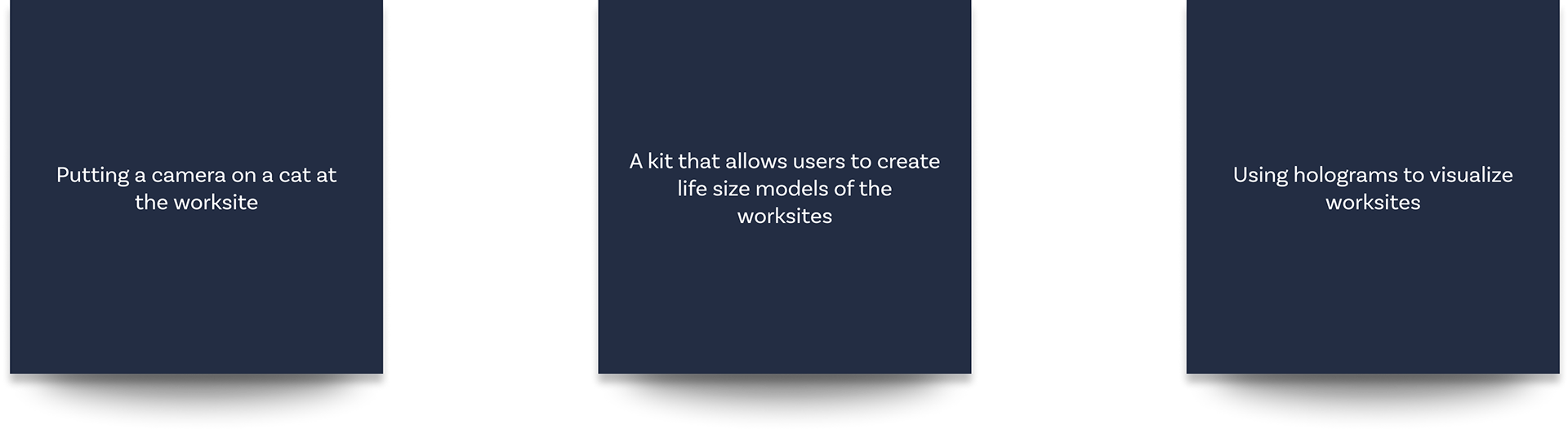
Ideation and Critique
We started our ideation sessions by creating “How might we” questions based on each persona’s frustrations and background. We then chose one question we wanted to focus on for that specific session and started to sketch ideas on sticky notes. We then picked our favorite designs and identified the most important aspects of each and discussed how they were connected to each other.
Key Features
- Easy to control the robot with the camera
- Camera interface on VR application similar to Apple UI
- Ability to render 3D environments based on captured data
- File directory with search capabilities
- Collaboration features that allow users to collaborate in real-time with other users
- Camera interface on VR application similar to Apple UI
- Ability to render 3D environments based on captured data
- File directory with search capabilities
- Collaboration features that allow users to collaborate in real-time with other users
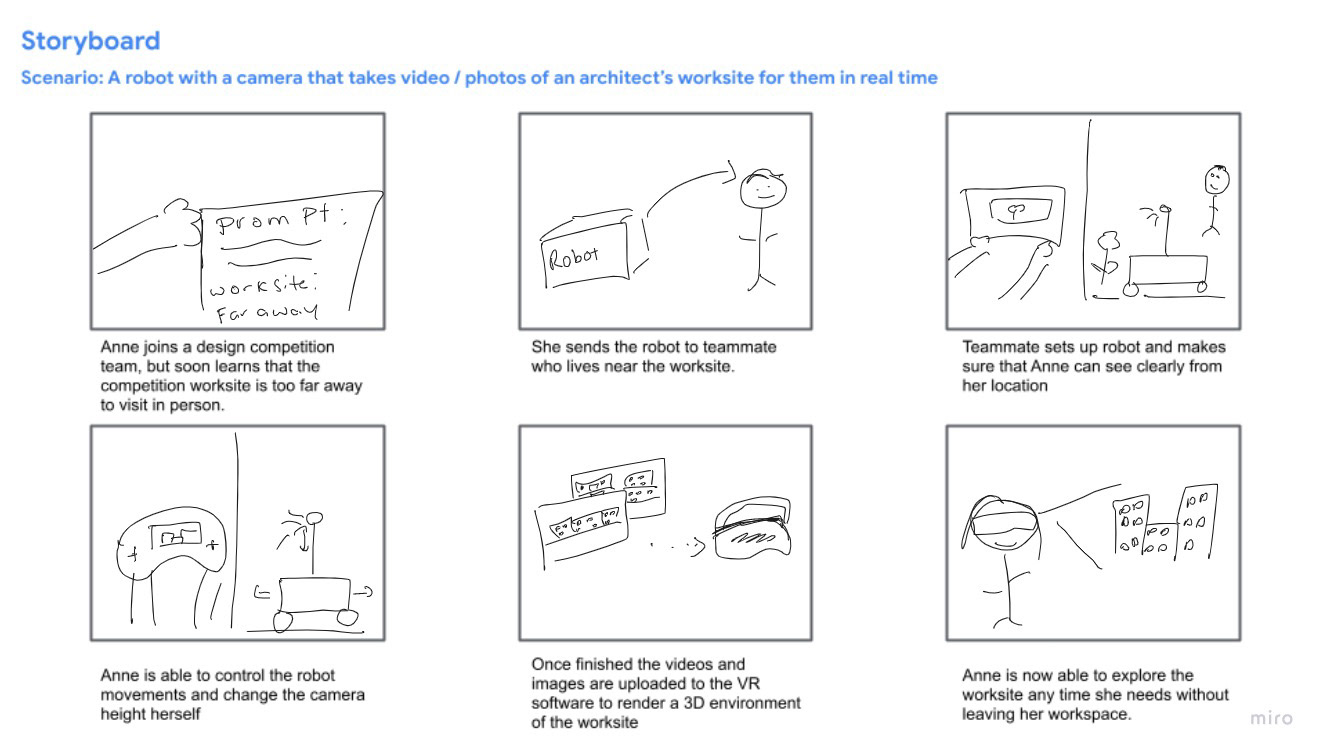
Storyboard from an Ecological Perspective
I created a storyboard from an Ecological Perspective to show how the robot is used in the context of a tool providing real-time videos and photos for an architect of their worksite. The storyboard also shows how the robot interacts with its user and the worksite environment. The storyboard helped with team understand the entire user experience including the different challenges and types of interaction the user will encounter.
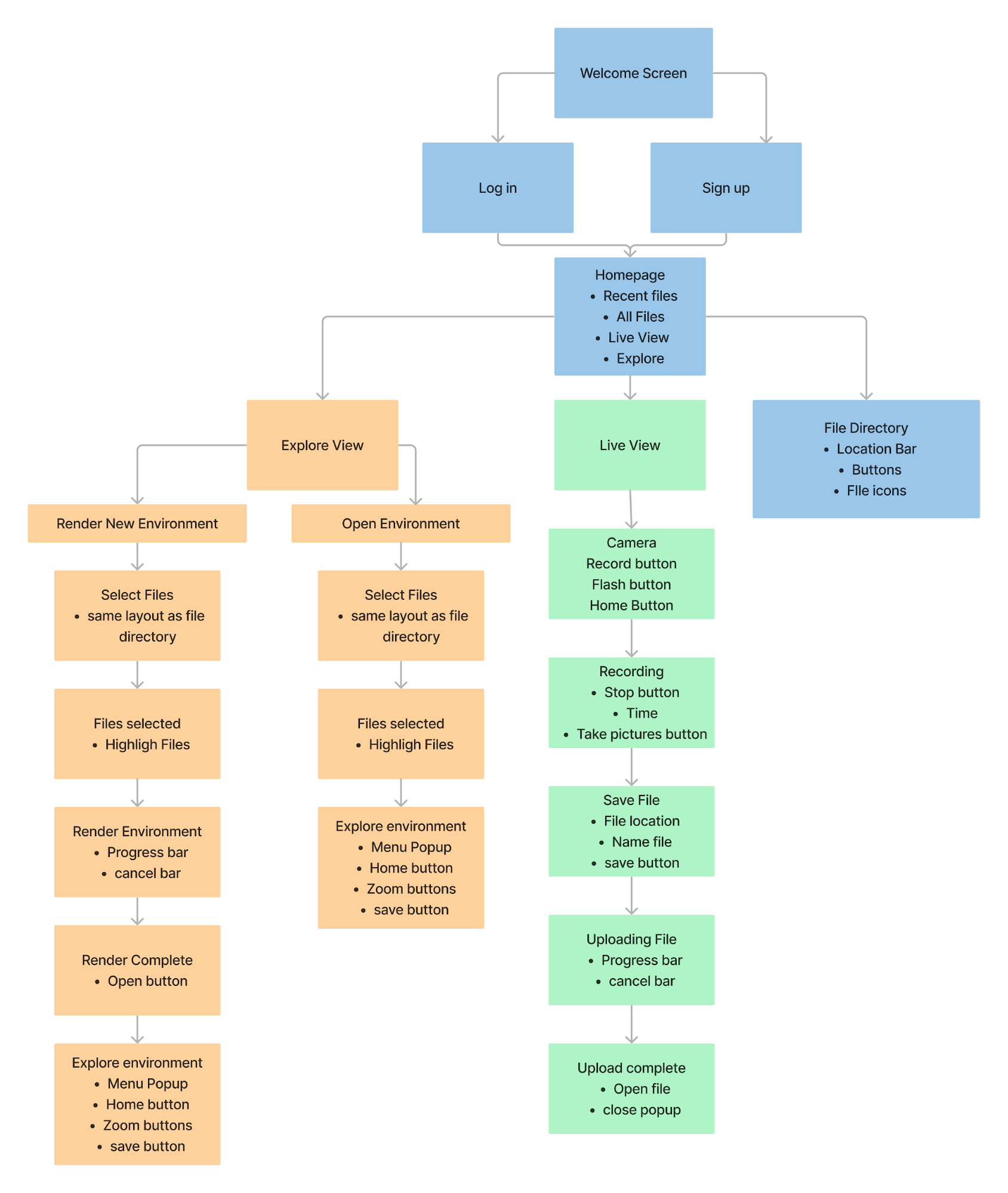
Site Map
I created a site map for the application to organize the pages that needed to be included along with the specific features for each page. The outline helped organize and determine what pages would be designed when we started making the wireframes.
3. Prototype
I decided on the scope for the prototype and created a clickable prototype using Figma. My teammate Jasmine created the robot prototype out of cardboard.
Scope
Due to time and resource constraints, a limited scope was determined to ensure that most features were designed and tested. The prototype is a T-prototype because it will showcase several different features but only focus on and go in-depth into a few features.
- Camera connection between the VR application and the robot.
- Controller usability
- Saving files on the VR application
- Retrieving files on the application
- Ease of navigation through the application
- Camera connection between the VR application and the robot.
- Controller usability
- Saving files on the VR application
- Retrieving files on the application
- Ease of navigation through the application
Prototypes
I created the prototype using Figma. Due to program constraints, the prototype is not a true VR application as users will experience everything in 2D. I created a limited prototype focusing on the key features defined above. Other elements are present in the design but not fully built out. Jasmine worked on the robot prototype which includes the body of the robot and its controllers both of which are built out of cardboard. Most features of the robot such as construction material are implemented at a surface level.


4. Evaluate
The prototype was tested with another HCI student using a heuristic rapid evaluation method.
Tasks Tested
The main purpose of our evaluation was to gain a better understanding of how the robot, user, and VR application would communicate with each other. Our tasks can be broken down into two categories, tasks that required the user to use the robot/controllers and tasks that required the user to use the VR application.
Robot/Controller Tasks
Move the robot through a course
Control the robot camera
Move the robot and camera at the same time
Start and stop a recording using the controller
Move the robot through a course
Control the robot camera
Move the robot and camera at the same time
Start and stop a recording using the controller
Application-Based Tasks
Start, stop, and save a recording on the application
Find and open specific files
Open an existing environment from the explore tab
Start, stop, and save a recording on the application
Find and open specific files
Open an existing environment from the explore tab
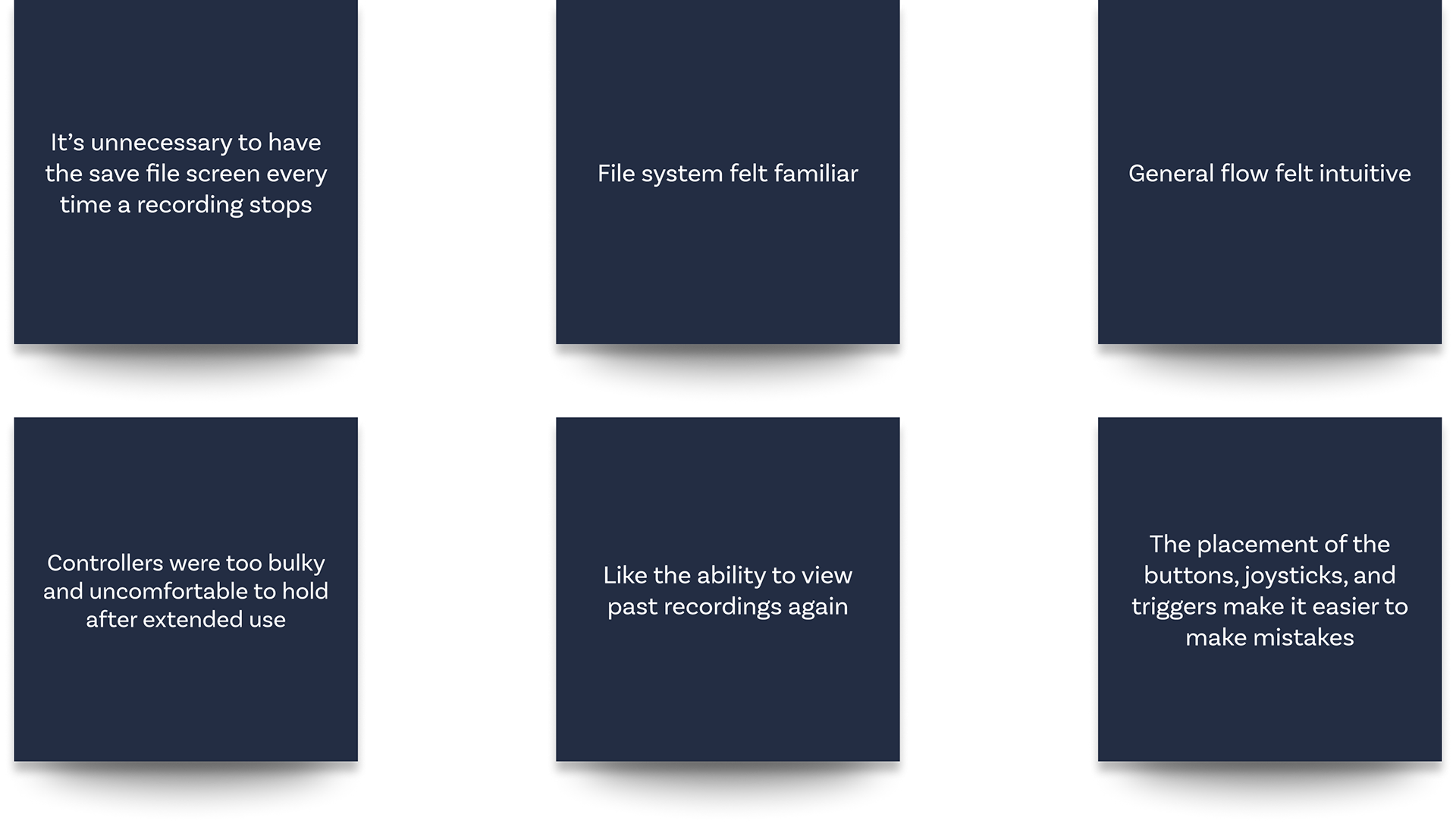
Insights from Testing
Next Steps
The time and resources of the project were limited but if I were to continue the project with more time and resources I would like the following to happen in the future:
- Make changes based on feedback to the controller and application
- Conduct full user testing with real VR headsets and the application with target users
- Work with engineers to implement functionality in the robot
- Handoff work to developers to implement full 3D render and collaboration functions
- Make changes based on feedback to the controller and application
- Conduct full user testing with real VR headsets and the application with target users
- Work with engineers to implement functionality in the robot
- Handoff work to developers to implement full 3D render and collaboration functions